

让一切成为可能
—让技术伴飞于概念,使天马行空的想法不再虚无,让概念不再羁绊于现有技术
涉足动态机械集群控制多年,摸爬滚打,一步一脚印,摸着石头过河,直到现在完善的开发环境,但脚步仍在向前!
故此做一下这些年来的一路研发简录

一切的起始
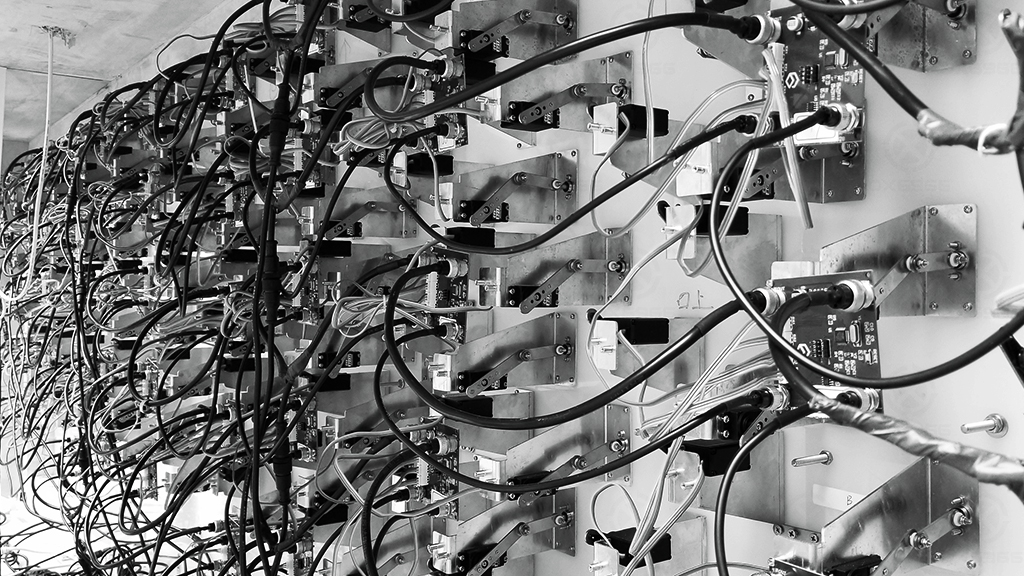
在刚开始介入机械控制的时候,采取的方式主要是采用市面上现有的驱控加自开发控制板以及市面上一些驱控。可随着时间的推移以及对动态雕塑/机械矩阵的动态效果的要求进一步提高,这种方式就不够用了,因为这种方式带来的不同项目需要每次针对性定制开发、机械控制效果不理想、布线复杂、编程控制效果等弊端就逐渐都显露出来了,因此,以解决这些问题为目的就成了接下来的工作,毕竟我们的宗旨就是没有什么做不到,就看我们想不想做了“让一切成为可能”嘛(哈哈,见笑了)。至此,一切的起始就开始了

填坑路
一体化驱控
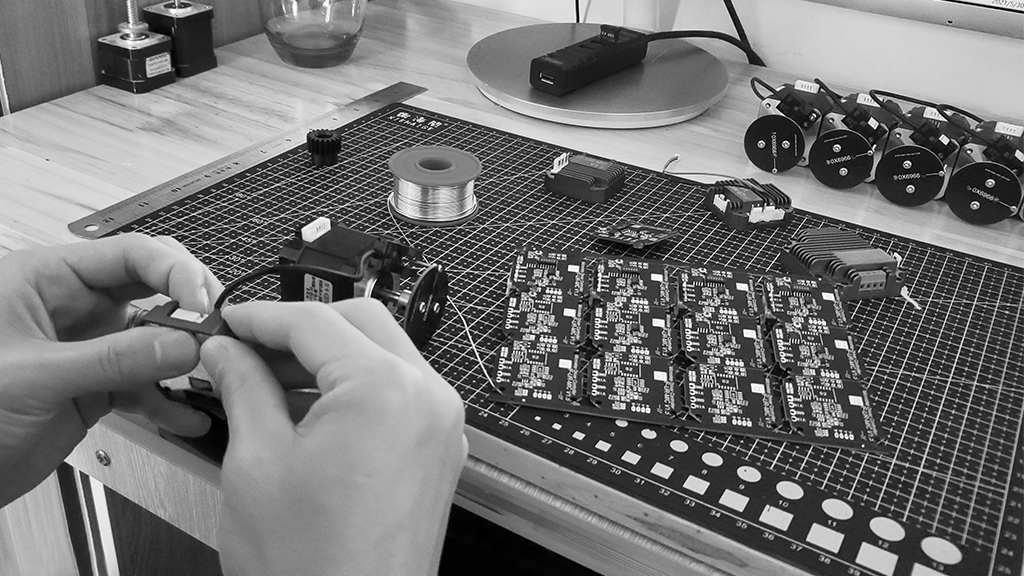
首先就是解决电机驱控了,电机驱控是所有机械装置的基础,没有这个其它就无从谈起了。同时驱控属于硬件范畴,硬件的试错成本很高,更不用说这种大规模的机械矩阵了,因此高可靠性、高性能、模块化、一体化、高集成度的驱控就变得非常重要了
而理想的驱控简单概括就是:简单、好用,能够简单配置就可以应用于不同场景,去除不同应用场景下的硬件部分开发消耗
奔着该目标,我们就开始了我们的工作!
同时也是一路填坑的开始,哈哈,苦逼
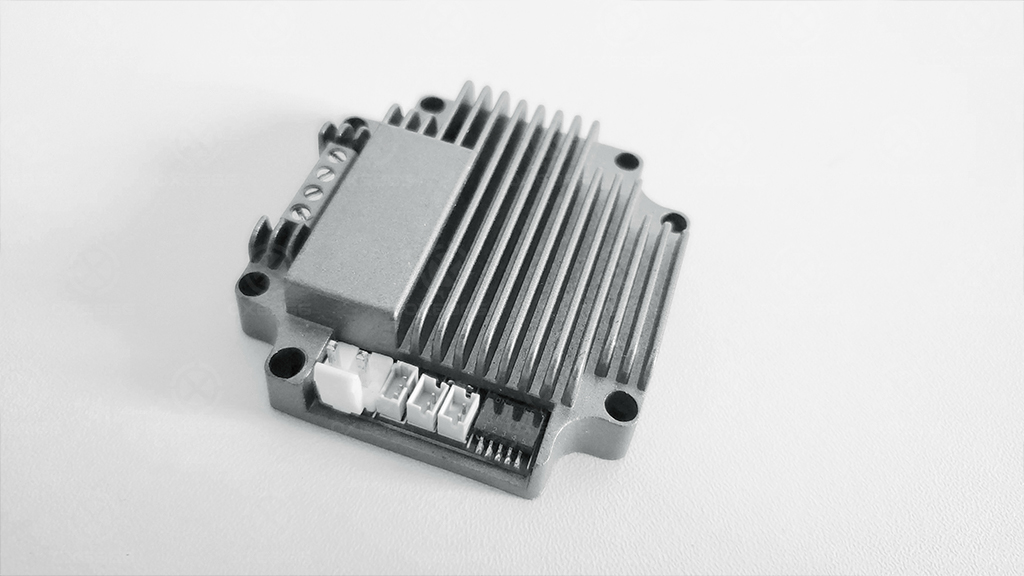
驱控的一体化/小型化要求
为求大幅度精简机械装置的整体布局,驱控力求做到一体化/最小化。驱控-从直观上来看就知道是包含了驱动以及控制部分的,不像传统的驱动以及控制部分是分开的,同时还要要求最小化/一体化的安装。例如,42步进电机的一体化安装就要求驱控尺寸最大只有42*42mm,同时还不算外壳的占用空间。要把这么多电子元器件塞到这么大点的一个空间本身就是个难点,同时还要做到驱控以及控制都包含在里面,而且还需要考虑业界最优的驱动以及完善的功能以及保护系统,这简直就是难上加难了
为达到以上目标,最开始的IF-UR-MIC总共经历了3次大版本升级,以及各版本内的多次修改,第一版本就经历了7次版本内修改

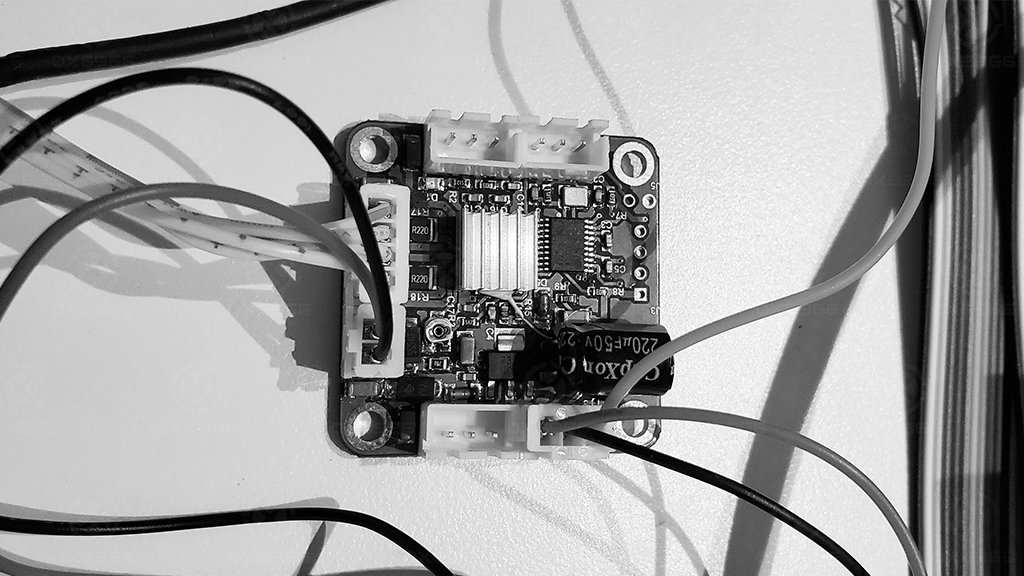

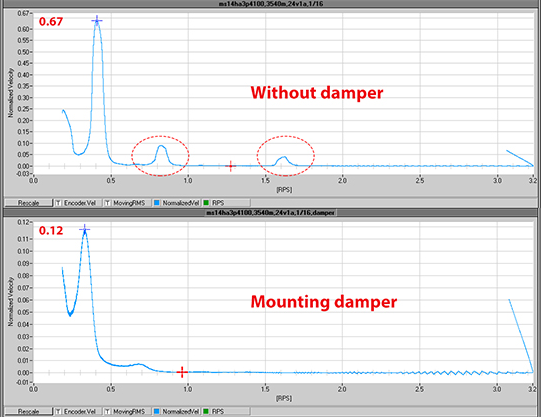
电机驱动时对电压稳定性的干扰
电机驱动电源桥将会以极高的 dI/dt 脉冲形式抽取整个线圈电流。因此,电源滤波和 MOSFETs 之间的任何电感都会导致严重的电压尖峰。同时驱控采用单一电源供电,电机工作时对整个直流电源系统带来很大的干扰,会导致电源产生很大的波动和尖峰(如下图),可能造成驱控的MCU无法进行正常通讯,严重时造成MCU死机
这必须避免


对‘柔’的极致要求
我们对动态雕塑/机械装置都有着极致的动态效果要求,要求以最少时间跟随的同时需要速度的绝对渐变,做到快中带缓,不带突变,以达到最好的机械运动呈现效果,因此就必须让驱控做到随我心意,指哪打哪了
由此我们采用了包括但不限于:S型加速曲线、最大细分、实时位置控制、电压模式PWM脉宽调制、自适应参数等一系列来达到此目的
电机自身共振
一般来讲,步进电机在运行情况下,当电机的运行频率接近或等于电机转子的固有频率时会发生共振,严重的会发生失步现象。所有的步进电机都有一个固有的低速扭矩波动,可以影响电机的运动。
在某些系统中,这种转矩波动会引起共振并以特定的速度增加,从而造成噪音
因此,为了削减电机共振带来的影响又给我们带来了很大的挑战
噪音处理
怎样降低机械装置的噪音一直都是主要的努力方向,单个机械模块的噪音可能并不大,但试想成千上百的机械模块组成的一个机械矩阵装置这噪音叠加上去就是不可忽略的了
机械装置产生的噪音主要是驱动、电机机械滚轴轴承、电机共振、机械结构的振动以及摩擦等引起的
机械结构
研究了各种各样不同的机械传动结构,例如:直线运动、圆周运动,同步带传动、齿轮传动、链条传动等等




动态雕塑映射控制平台-KSSM
驱控有了,机械装置用来呈现的硬件基础平台就有了,对于完整的机械装置来说可以说是完成了一半。另外的一半就是效果的呈现了,也是最终给到观众的直观体现。
按照以往传统的做法就是,动态效果的控制由工程师直接源码来编写控制。但该方式带来了两个主要的弊端:一、动态效果由工程师来直接控制,但像这种机械装置动态效果偏向艺术性的一般为艺术家或者设计师来把控最终的动态效果,即最终的效果设计者和直接控制者并不是同一个,但天生的这两者的行为方式可以说是完全相反的(除了部分全能的新媒体行家除外哈),一个逻辑严谨,一个天生浪漫,哈哈。这就往往导致了最初设想的动态效果并不能呈现,或者是花费大量的时间成本。二、每个不同的机械装置必然有不同的结构以及布局,也就意味着每次项目都要重新编写。
秉着我们的宗旨 – 让一切成为可能,当然不能够让这一直存在了。因此,动态雕塑映射控制平台-KSSM (Kinetic Sculpture ScreenMapping)也就应运而生了。
KSSM(Kinetic Sculpture ScreenMapping)是0X6966工作室推出的一款针对电机驱动的动态雕塑或机械矩阵动态效果控制的一个可视化平台,免去硬件层面的控制编程,核心是简便、易用,将效果层面上的呈现交还给艺术家、设计师
对未来的创想
解决了以上问题,完善了动态雕塑/机械装置的开发环境,接下来肯定就是进一步的创新探索研发啦
缺的不是技术,可怕的是没有敢于创想的想象力
高速感知网络-HSCN的提出
HSCN(High-speed Cognitive Network)是0X6966工作室提出的一种双向高速通信协议,给出了一种控制端与节点之间大规模控制以及反馈的协议标准,旨在扩展传统总线通信单向以及速率问题,使实时控制与反馈成为可能,致力于创造、扩展新媒体装置的互动形式以及带来更多的创意创作
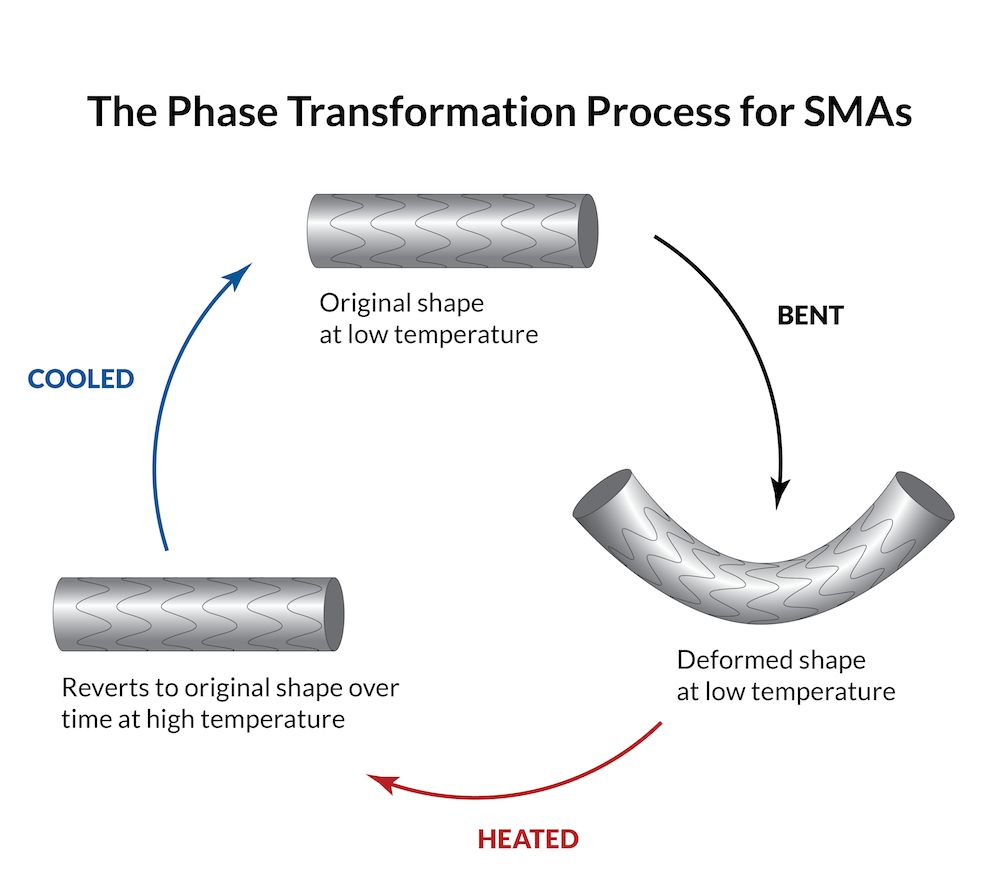
对材料的探讨
为了扩展动态雕塑/机械装置的材料应用,以期带来更多的机械装置形式。
分别探索了不同材料对应用于机械装置的一种可行性探讨,例如柔性材料、记忆合金等


运动动力的形式革新
让机械装置的运动动力不再局限于电机的传动,探索更多其它动力在机械装置上的一种可行性